css
接口
经验
html
Linux驱动开发
嵌入式Linux SPI驱动
电子学会2022年9月考试
计算机毕业设计
脚本实战
敏捷流程
web3py
汇编大作业设计
dw网页设计
Spring AOP失效
pwn
拥塞控制
web框架
微信官方扫码登录文档
dnn
MMDetection
gazebo
2024/4/11 15:02:42
阿克曼前轮转向车gazebo模型
想要一个阿克曼转向结构车的gazebo模型,要求能够用ros话题控制前进速度和前轮转角。
令人惊讶的是,网上基本没有这种模型。
racecar模型
首先古月居提供了一个racecar的模型,可以控制速度和前轮转角。这个模型也是七八年前外国某人做的&am…

rviz闪退原因和解决办法
rviz一启动就闪退,可能是因为一些rviz中读的话题数据有误,比如path、pose中的四元数为(0,0,0,0),rviz显示不了这样的位姿,就会自动关闭。
而这样的不合格的数据往往是话题初始化没做好,默认都给了0。修改四元数初始值…
roslaunch px4 multi_uav_mavros_sitl_sdf.launch报错
转载自:https://www.cnblogs.com/pig-fly/p/13971458.html
在试图运行multi_uav_mavros_sitl_sdf.launch时报错: while processing /home/sp/src/Firmware/launch/single_vehicle_spawn_sdf.launch: Invalid <param> tag: Cannot load command p…
Ros-gazebo xacro文件命名空间
xacro是urdf模型文件的升级版。如果想要在gazebo中用ros的spawn-model以<group ns"$arg(namespace)">同时打开多个这个xacro模型,要注意xacro文件中不要设置绝对的命名空间! <gazebo><plugin name"gazebo_ros_control&quo…
ROS与GAZEBO实时硬件仿真(3)——将gazebo和ros连接起来
版权声明: https://blog.csdn.net/wubaobao1993/article/details/81054570
写在前面
通过上两节的博客,相信朋友们已经对gazebo的一些标签有了较为深入的认识,但是特别是上一节,程序写完了之后发现并没有什么特别的变化。着实&a…
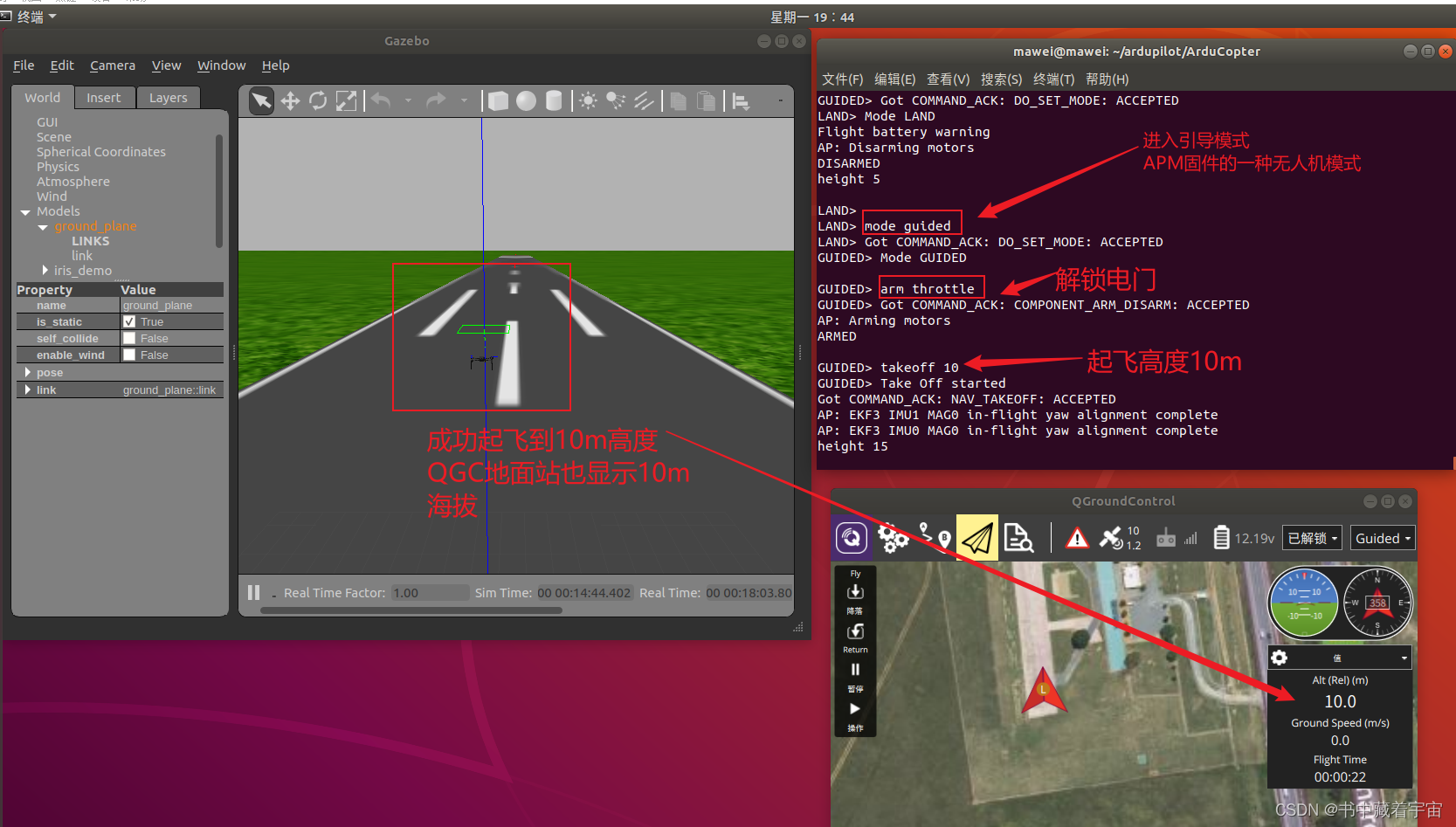
APM固件编译和仿真
事情起因
主要想对无人机APM固件进行仿真的算法验证,因实际飞行的过程实际验证太浪费飞机了,所以就先试用仿真对算法进行仿真开发。
一,环境搭建
环境搭建我建议参考官方英文教程,英文教程写的比较全,不懂可以自己使…
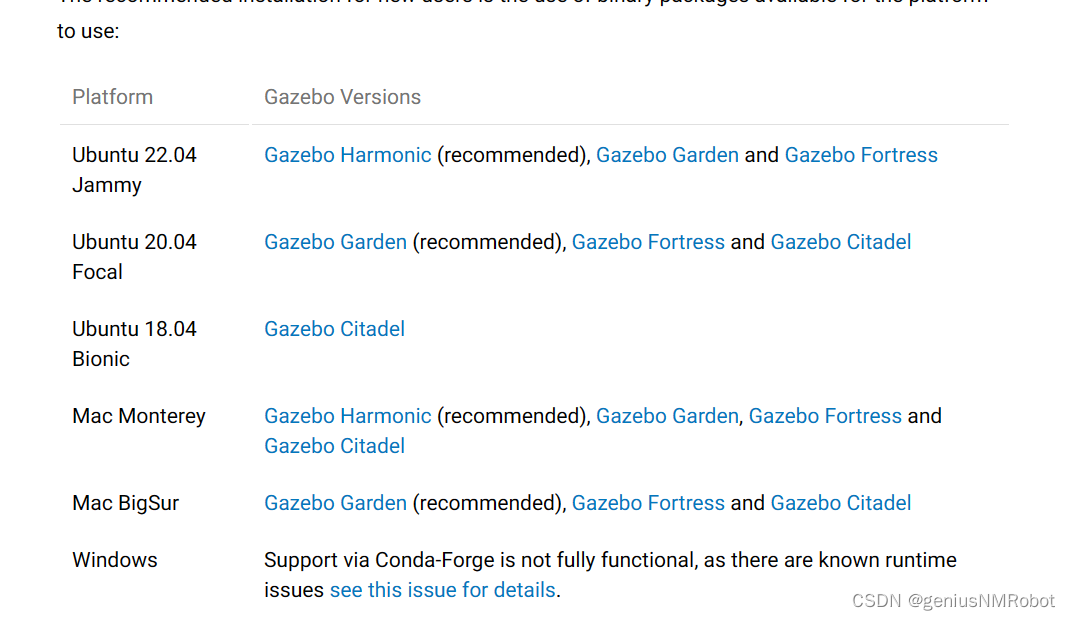
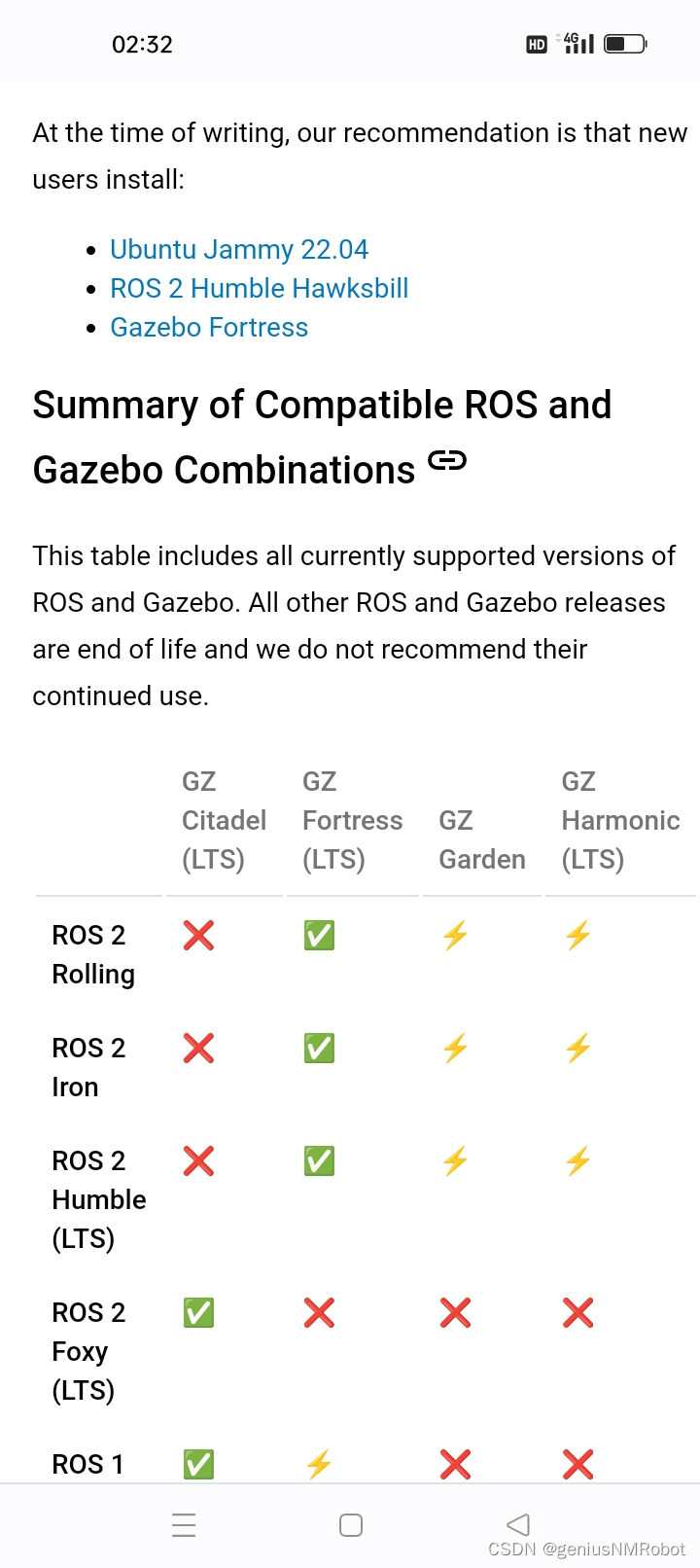
ubuntu22.04+ROS2推荐匹配的gazebo版本
放大以后看到: 可以看到ros2推荐使用版本是humble-----匹配的是Ubuntu22.04LTS -------匹配gazebo Harmonic
ros2机器人在gazebo中移动方案
原文连接Gazebo - Docs: Moving the robot (gazebosim.org) 很重要的地方:使用虚拟机运行Ubuntu的时候,需要关闭”加速3D图形“的那个选项,否则gazebo无法正常显示。
Moving the robot(使用命令移动机器人示例)
In t…
sdf模型插入gazebo_ros_control插件
gazebo_ros_control目前只支持老版的urdf模型,官方教程:http://gazebosim.org/tutorials/?tutros_control
sdf模型怎么办呢?回答:
https://answers.ros.org/question/223196/using-gazebo_ros_control-with-sdf-instead-of-urd…
Gazebo 从 Ignition 迁移指南
系列文章目录 文章目录 系列文章目录前言一、概览1.1 变化1.2 Tick-tocks and Hard-tocks1.3 Tick-tocks1.3.1 Namespaces(命名空间)1.3.2 Source(源文件)1.3.3 CMake and Packaging(CMake 和打包)1.3.4 Mi…
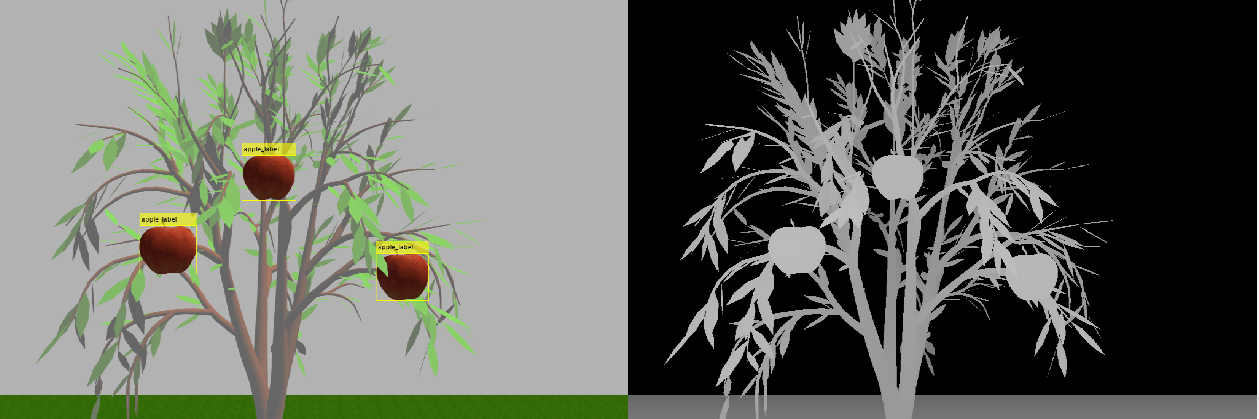
从零开始的机械臂yolov5抓取gazebo仿真(导航贴)
本篇博客为《从零开始的机械臂yolov5抓取gazebo仿真》系列的导航贴
该导航帖将会不断更新
从零开始的机械臂yolov5抓取gazebo仿真视频链接:项目视频链接
一.教程部分
从零开始的机械臂yolov5抓取gazebo仿真系列目录如下 1.在SolidWorks中将机械臂模型导出机械臂…

ROS与GAZEBO实时硬件仿真(2)——urdf的gazebo属性
版权声明: https://blog.csdn.net/wubaobao1993/article/details/80960584 写在前面 通过上一节的博客,相信朋友们已经对urdf有了一个较为完整的认识,应该也可以自主的写一个urdf文件在ros和gazebo看到了,但是仅仅是这样ÿ…

Gazebo GPU加速【gzserver running in GPU】
文章目录 Gazebo GPU加速1. 问题2. 解决办法2.1 本机运行 2.2 headless3. 补充3.1 如何确定的Gazebo为OpenGL渲染3.2 显卡驱动--no-opengl-files3.3 nouveau Gazebo GPU加速
1. 问题
Gazebo仿真帧率极低,fps在10以下,同时显卡驱动已安装,但…

gazebo model的sdf文件中的uri路径
让我们先看一个gazebo模型的sdf文件iris_depth_camera_down.sdf
<sdf version1.5><model nameiris_depth_camera_down><include><uri>model://iris</uri></include><include><uri>model://depth_camera_new</uri><p…

ROS与GAZEBO实时硬件仿真(1)——urdf的编写
版权声明: https://blog.csdn.net/wubaobao1993/article/details/80947968 写在前面 接触gazebo也差不多有一年之久了,当时使用gazebo是因为比赛的时候,机械的进度没有那么快,此时算法不能停啊,因此就用了gazebo的实时…
MATLAB - Gazebo 联合仿真 —— 使用 UR10 机械臂检测和采摘水果
系列文章目录 文章目录 系列文章目录前言一、设置 Gazebo 仿真环境二、在 Gazebo 中模拟和控制机器人2.1 概述2.2 任务调度器2.3 感知和目标生成系统2.4 运动规划2.5 机械臂和关节控制系统 三、分配用于控制机器人的参数3.1 定义机器人模型和运动规划参数,3.2 定义机…
ROS2 与 Gazebo 联合仿真项目模版
系列文章目录 文章目录 系列文章目录前言一、包含的软件包二、安装2.1 安装要求2.2 作为模板使用 三、用法3.1 安装依赖项3.2 构建项目3.3 source 工作空间3.4 启动仿真 四、详细用法4.1 软件包结构4.2 仿真资源配置 总结 前言
一个集成了 ROS 2 和 Gazebo 模拟器的模板项目。…
Inkscape SVG 编辑器 导入 Gazebo
概述
本教程描述了拉伸 SVG 文件的过程,这些文件是 2D 的 图像,用于在 Gazebo 中为您的模型创建 3D 网格。有时是 更容易在 Inkscape 或 Illustrator 等程序中设计模型的一部分。
在开始之前,请确保您熟悉模型编辑器。
本教程将向您展示如…
ROS常见问题 | Unable to convert from SDF version 1.7 to 1.6
文章目录 环境复现BUG原因解决环境
Ubuntu 18.04LTS ROS Melodic
复现
打开Gazebo并加载.world类型文件
BUG
Unable to convert from SDF version 1.7 to 1.6原因
无法将SDF的版本从1.7改到1.6
解决
①找到你加载的.world类型文件 ②修改.world类型文件中的sdf version…
基于 parallels ubuntu 20.04 LTS (focal) 的ros+px4+gazebo 安装
系统环境:
主机环境macos 14.2.1 (23C71)、M1芯片Paralles商业版 19.1.0 (54729)ubuntuubuntu 20.04 LTS (focal)PX4v1.14.0ROS2foxy
虚拟机安装
1. 下载安装 parallels,参考评论;
2. 下载 ubuntu 镜像,使用 ubuntu 20.04 LT…
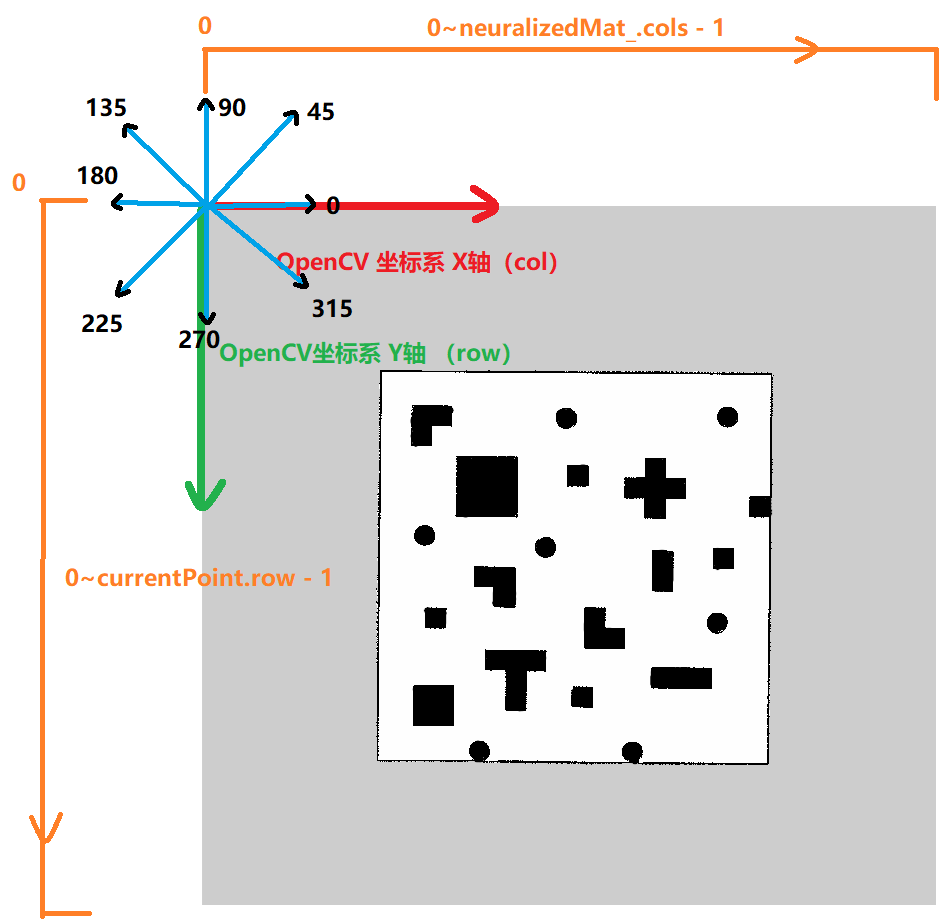
全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(下)
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。 1、全覆盖路径规划开…
gazebo中urdf、xacro、sdf模型文件关系
gazebo的模型是用xml格式的文本文件来描述的。具体有三种形式:.urdf, .xacro, .sdf
urdf
urdf是老的gazebo模型格式,本身有一些缺陷,也缺一些功能。但是网上很多gazebo模型都是这个格式的。
urdf官方文档:
http://wiki.ros.or…
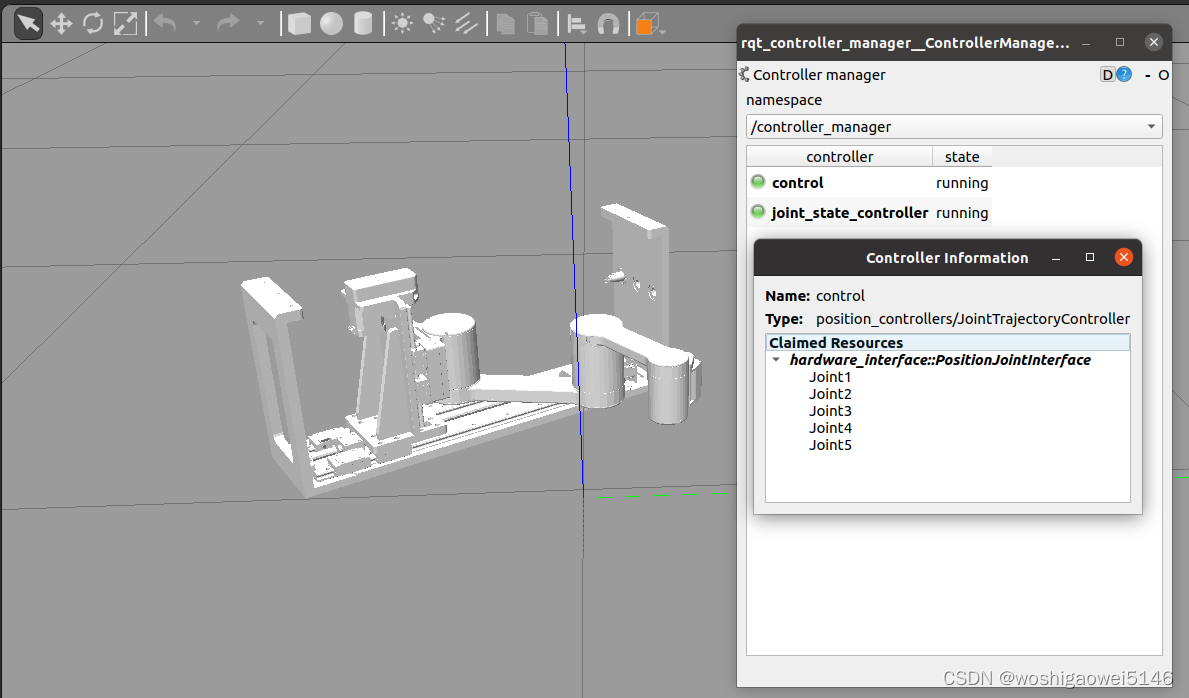
MoveIT Rviz和Gazebo联合仿真
文章目录环境安装概述ros_control框架ros_control数据流文件配置附加工具故障问题解决参考接前两篇:ROS MoveIT1(Noetic)安装总结 Solidworks导出为URDF用于MoveIT总结(带prismatic) MoveIT1 Assistant 总结 环境
Ubu…
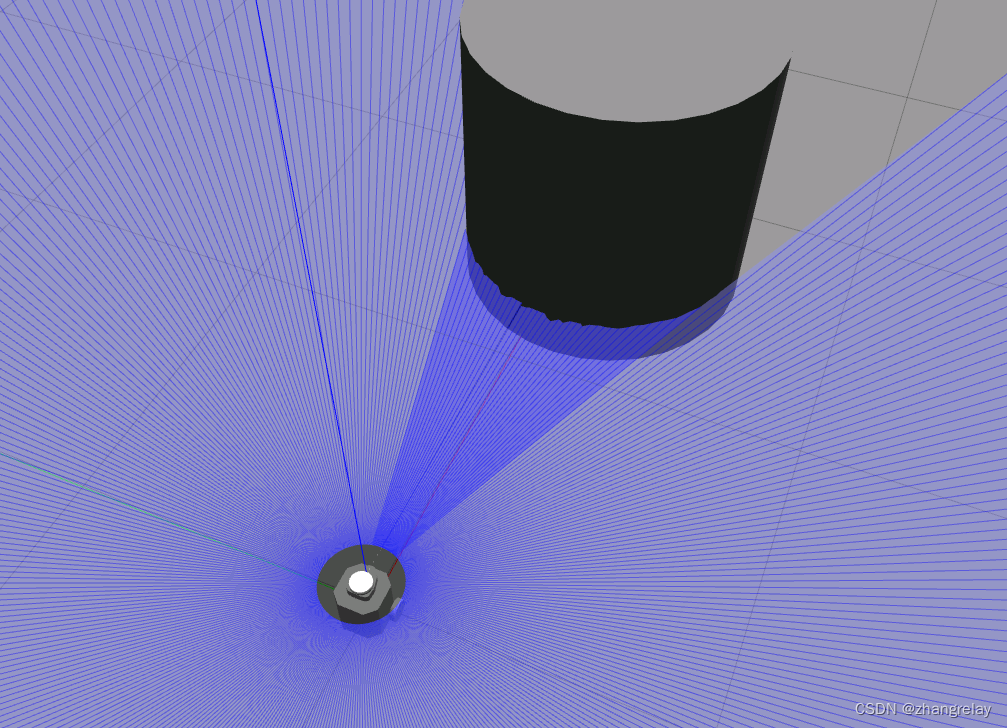
ros2激光雷达<gazebo>仿真资料
Lidar sensor激光雷达传感器
We dont want our robot to touch the wall at all because this may cause some damage, so instead of the contact sensor we can use the Lidar. Lidar is an acronym for "light detection and ranging". This sensor can help us …
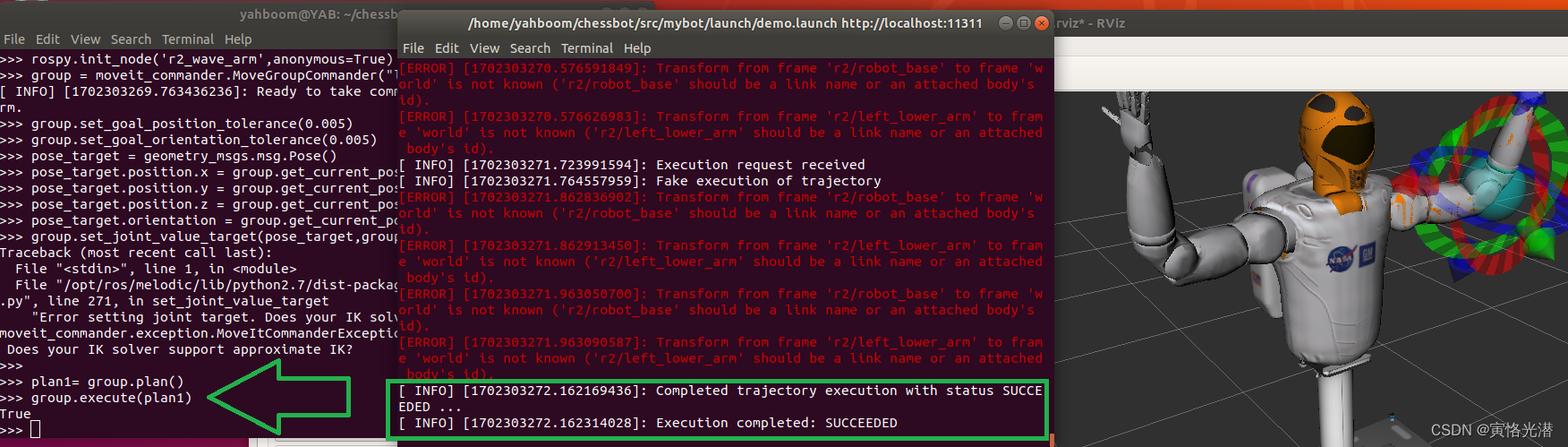
ROS仿真R2机器人之安装运行及MoveIt的介绍
R2(Robonaut 2)是NASA美国宇航局与GM通用联合推出的宇航人形机器人,能在国际空间站使用,可想而知其价格是非常昂贵,几百万美刀吧,还好NASA发布了一个R2机器人的Gazebo模型,使用模型就不需要花钱了,由于我们…
![Gazebo打不开,报错process has died[pid 7798, exit code1]解决办法](https://img-blog.csdnimg.cn/1f99016e69294055872178a316022d25.png#pic_center)
Gazebo打不开,报错process has died[pid 7798, exit code1]解决办法
Gazebo打不开,报错process has died[pid 7798, exit code1],如下图所示: 原因:可能是由于有gazebo进程没有终止,所以无法打开。
解决办法:依次执行下面两个命令
killall gzserver
killall gzclient问题解…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…

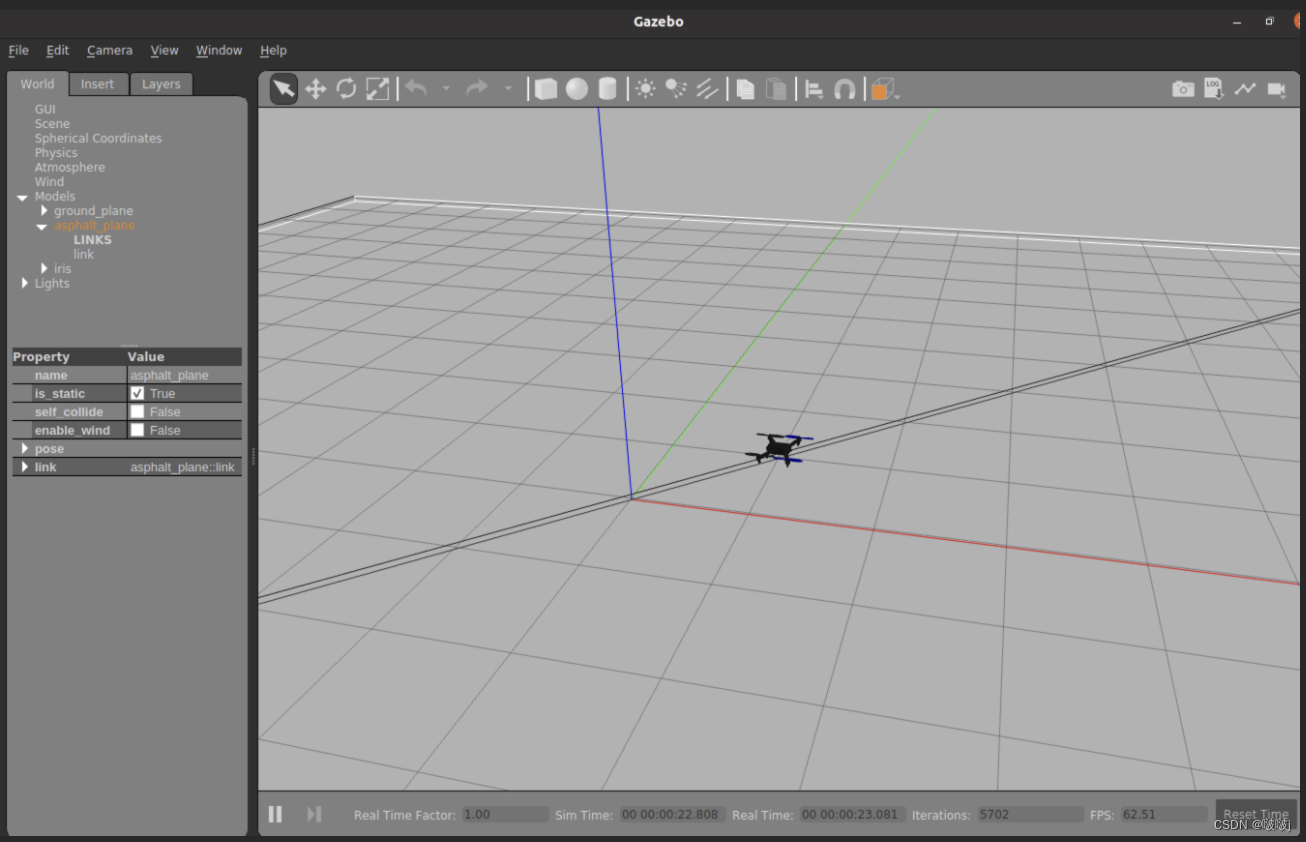
【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法 问题描述解决方法 问题描述
无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。 观察Gazebo左侧Wo…

二自由度机械臂的gazebo仿真
一、创建ros软件包
#1、创建工作空间
mkdir 2d_robot_ws
cd 2d_robot_ws
mkdir src
cd src
catkin_init_workspace
#2、编译工作空间
cd ..
catkin_make
#3、创建软件包
catkin_create_pkg 2d_robot std_msgs rospy roscpp二、创建模型文件
1、编写urdf模型文件
在2d_robot_…
ROS2机器人编程简述humble-第四章-AN OBSTACLE DETECTOR THAT USES TF2 .1
如何检测一个障碍物呢?视觉、雷达?可视化效果如何?机器人所装备的传感器例如感知设备,主要负责环境的获取和识别。然后,结果发送给电机控制运动,在环境中自主、智能决策和规划。需要先简单看一下仿真可视化…
livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形
livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形 livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形livox 介绍更换仿真中mid360雷达外形 livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形
livox 介绍
览沃科技有限公司(L…
PX4-Autopilot配置(gazebo)
推荐使用当前版本或stable及release版本;
要clone当前最新(debug)并且下载submodules:
git clone gitgithub.com:PX4/PX4-Autopilot.git --recursive更推荐的做法是,使用release的分支:
git clone --bra…
ros2+gazebo+urdf:ros2机器人使用gazebo的urdf文件中的<gazebo>部分官网资料
原文链接SDFormat extensions to URDF (the gazebo tag) — Documentation
注意了ros2的gazebo部分已经跟ros1的gazebo部分不一样了: Toggle navigation SpecificationAPIDocumentationDownload
Back
Edit Version: 1.6 Table of C…
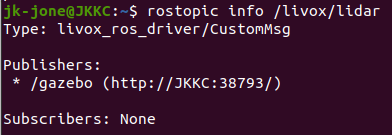
点云格式转换:将 ros PointCloud2格式数据转为livox CustomMsg格式
将 ros PointCloud2格式数据转为livox CustomMsg格式 前言点云格式PointCloud2 点云格式livox CustomMsg 点云格式 将 ros PointCloud2格式数据转为livox CustomMsg格式测试 前言
览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业࿰…
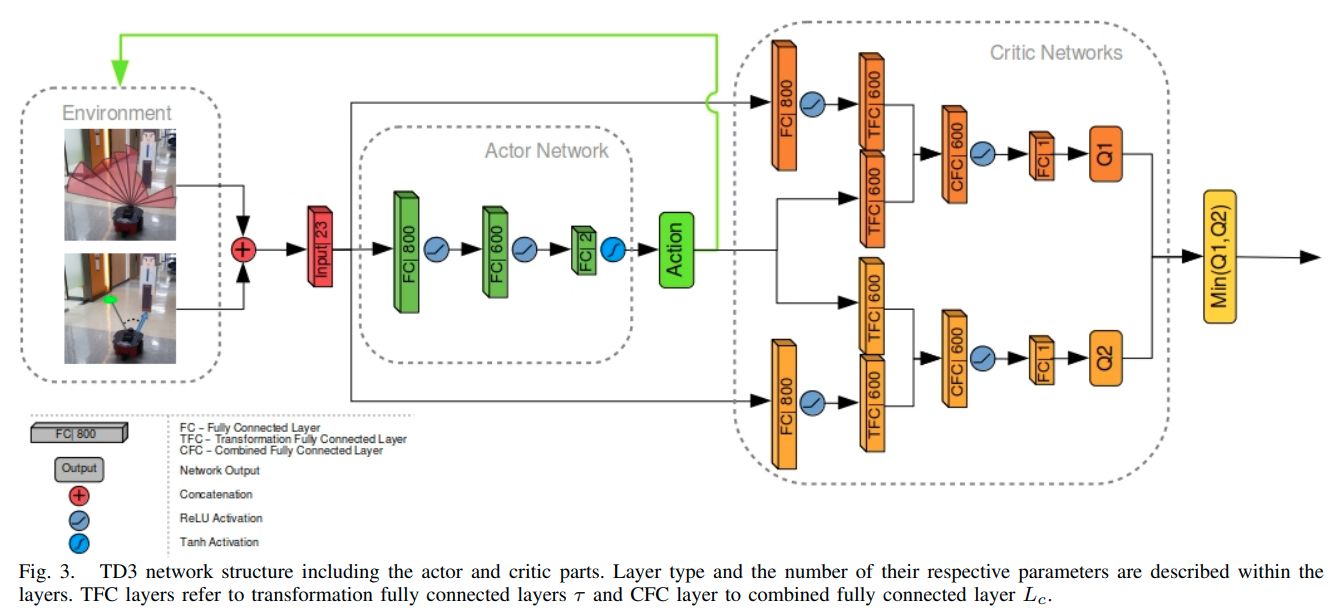
Gazebo仿真环境下的强化学习实现
Gazebo仿真环境下的强化学习实现
主体源码参照《Goal-Driven Autonomous Exploration Through Deep Reinforcement Learning》 文章目录 Gazebo仿真环境下的强化学习实现1. 源码拉取2. 强化学习实现2.1 环境2.2 动作空间2.3 状态空间2.4 奖励空间2.5 TD3训练 3. 总结 1. 源码…
ROS 和 Gazebo 模拟器实现未知环境探索的快速探索随机树算法
ROS 和同步定位和映射
ROS 最流行的应用之一是 SLAM(同步定位和映射)。 移动机器人中 SLAM 的目标是借助连接到机器人的可用传感器构建和更新未探索环境的地图,该传感器将用于探索。
快速探索随机树算法
快速探索随机树 (RRT) 是一种数据结…
Python编程ROS机器人
机器人操作系统 (ROS) 是研究和工业中最受欢迎的机器人软件框架之一。它具有多种功能,可以在机器人中实现不同的功能,而无需从头开始实现。
首先向您展示 ROS 的基础知识,以便您了解差分机器人的基础知识。 然后,您将了解机器人建…
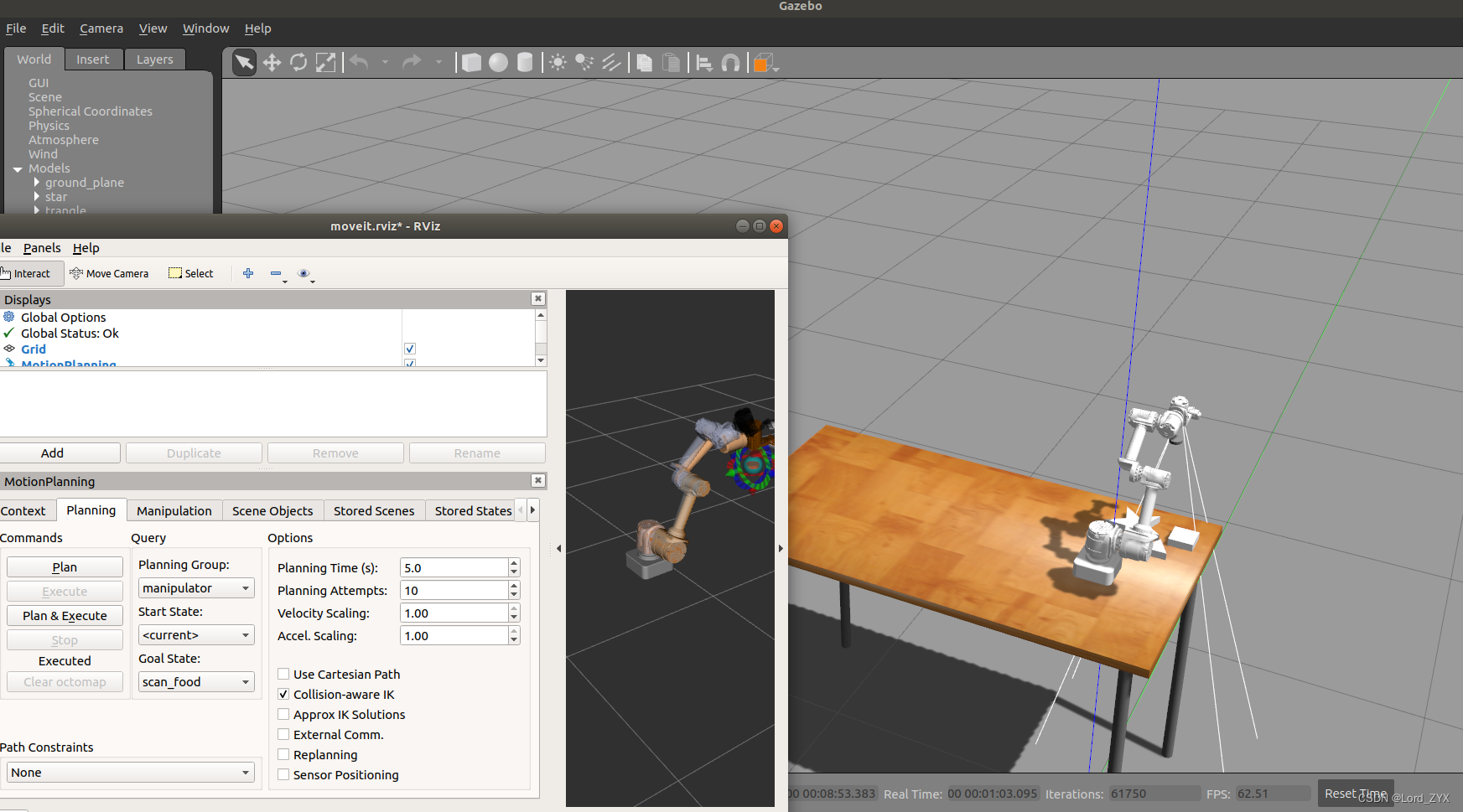
从零开始的机械臂yolov5抓取gazebo仿真(四)
Moveit与Gazebo联合仿真
上一篇博客已经将moveit!配置完毕,然而想要让moveit!控制gazebo中的机械臂,还需要进行一些接口的配置。现在我们有的功能包为sunday_description、sunday_moveit_config这两个功能包。且已经配置好xacro文件,本篇内容…
gazebo 仿真 kinect 获取点云数据
项目地址:https://github.com/yym68686/ros-slam
简介
使用 urdf 文件构建仿真机器人,在 gazebo 搭建仿真环境,导入人造卫星的 stl 文件,利用仿真 kinect 深度相机获取人造卫星的点云数据并在 RVIZ 中可视化,将 Poin…
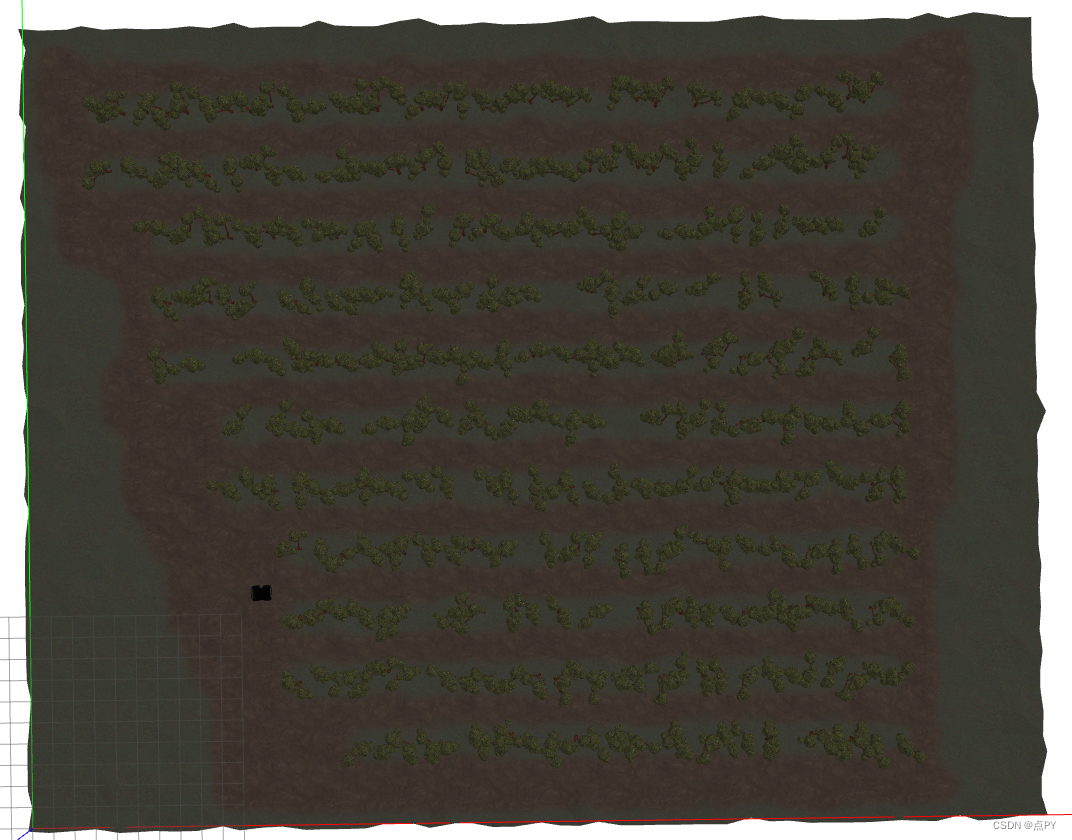
机器人在果园内行巡检仿真
文章目录 创建工作空间仿真果园场景搭建小车模型搭建将机器人放在仿真世界中创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws仿真果园场景搭建 cd ~/catkin_ws/src
git clone https://gitcode.com/clearpathrobotics/cpr_gazebo.git小车模型搭建
DiffBot是一种具有两个…
MATLAB - Gazebo 仿真环境
系列文章目录 前言
机器人系统工具箱(Robotics System Toolbox™)为使用 Gazebo 模拟器可视化的模拟环境提供了一个界面。通过 Gazebo,您可以在真实模拟的物理场景中使用机器人进行测试和实验,并获得高质量的图形。
Gazebo 可在…

【ROS】例说mapserver静态地图参数(对照Rviz、Gazebo环境)
文章目录 例说mapserver静态地图参数1. Rviz中显示的地图2. mapserver保存地图详解3. 补充实验 例说mapserver静态地图参数
1. Rviz中显示的地图
在建图过程中,rviz会显示建图的实时情况,其输出来自于SLAM,浅蓝色区域为地图大小,…
gazebo harmonic版本设置自定义sdf文件
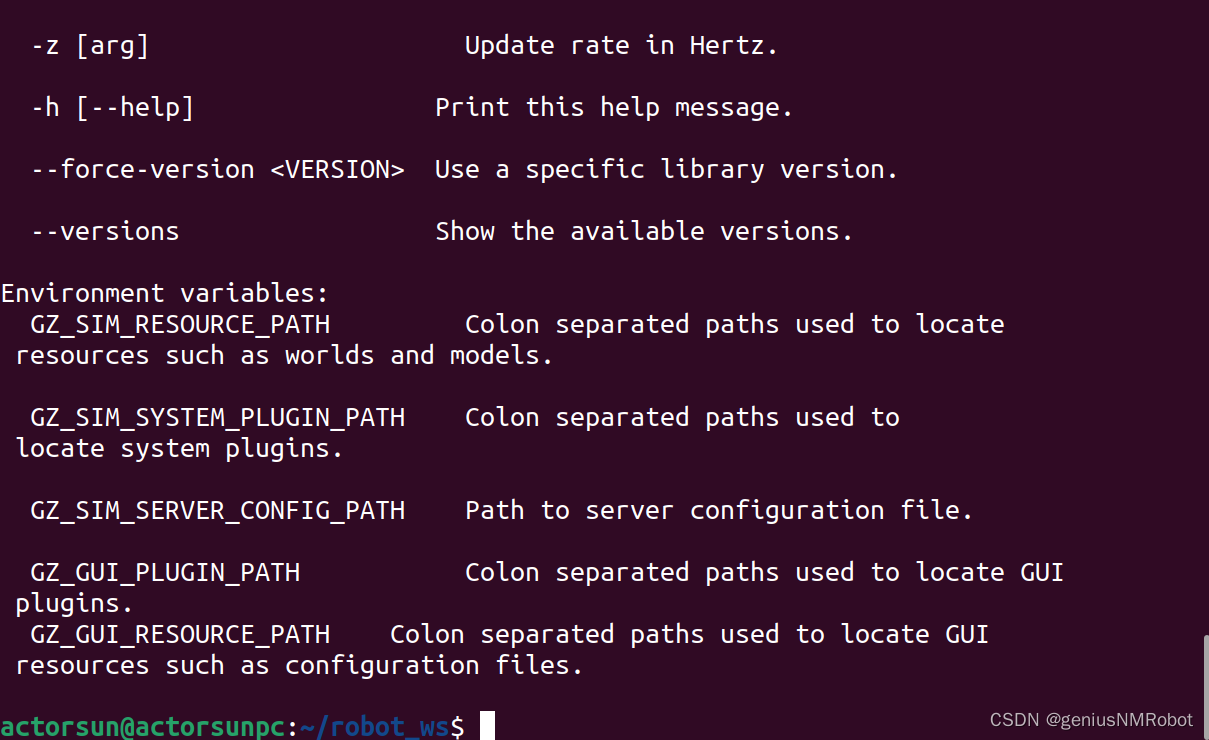
首先要设置环境变量GZ_SIM_RESOURCE_PATH 为sdf文件存放路径,
然后在include文件中使用上图方式就可以了 输入gz sim -h获取帮助
还有一个很重要的地方要说明:要直接使用gazebo软件一次性保存到指定文件夹,如果先放在文件夹A,然…
gazebo安装版本--公元2024年1月
不好意思我误导了各位,顺便也误导了我自己。。。。。。。。。
harmonic版本只适合单独使用,不适合与ros2配合仿真。
到2024年1月,只有fortress版本能与ros2配合使用

使用sdf文件+urdf文件模拟机器人示例(不用把urdf转sdf)
gazebo版本:harmonic;
<launch>
<group>
<let name"robot_description" value"$(command xacro $(find-pkg-share gazebo_pkg)/urdf/total.xacro)"/>
<node pkg"rviz2" exec"rviz2" name…
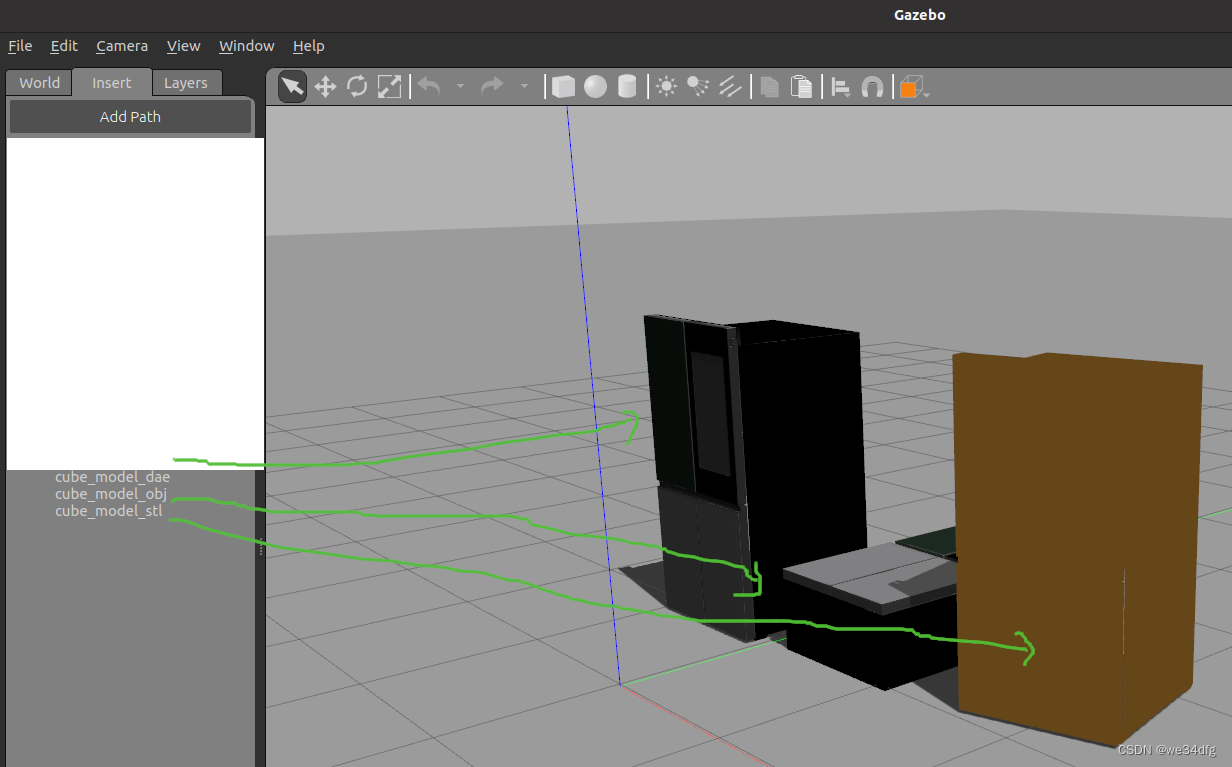
gazebo 导入从blender导出的dae等文件
背景: gazebo 模型库里的模型在我需要完成的任务中不够用,还是得从 solidworks、3DMax, blender这种建模软件里面在手动画一些,或者去他们的库里面在挖一挖。
目录
1 blender
1-1 blender 相关links
1-2 install
2 gazebo导入模型 2-1 g…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化
在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现…

启动gazebo harmonic
ros2 launch ros_gz_sim gz_sim.launch.py gz_version:8 如果不输入gz_version:8,默认就是6,启动的就是默认版本ign版本 左边那个是8,右边那个是6
ros2中ros_gz_bridge/gazebo安装的注意事项
这个搞错了:这个是安装ros_gz_bridge的,不是安装gazebo的 AT:如果是安装的Harmonic,在安装ros_gz_bridge的时候要从源码编译 ros2完整版里面好像已经包含了gazebo的一个版本 包名应该就是叫ros-humble-ros-ign-gazebo 所以gazebo是作为一个普…
gazebo卡住不动
可以看到这个sdf文件里面含有网络连接,有的sdf文件看上去几十个kb,
以为很小,但是里面含有网络连接就不知道有多大了,所以也可能会卡住,然后就会出现这个

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
ros2内结合gazebo和rviz进行yolov8检测记录
前提:第一次接触ros2, 遇到的问题解决方式不一定准确,只是这次我尝试成功了,想和大家分享一下。
ubuntu20.04系统
目录
1. ros2
1.1 ros2是啥?
1.2 ros2的版本和ubuntu版本的对应关系,当下入门尤其是ubuntu20.04系…
Ubuntu20.04安装gazebo11报错
在这记录下安装gazebo11的报错解决方案,本人遇到问题的过程:我在安装gazebo11后又卸载了全部相关的东西,然后用命令sudo apt upgrade升级了下Ubuntu20.04里的一些东西,升级过程中弹出了选择 MySQL 的东西,貌似当时操作…
livox 半固体激光雷达 gazebo 仿真 | 安装与验证
livox 半固体激光雷达 gazebo 仿真 | 安装与验证 livox 半固体激光雷达 gazebo 仿真 | 安装与验证livox 介绍安装验证 livox 半固体激光雷达 gazebo 仿真 | 安装与验证
livox 介绍
览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业…

livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号
livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号 livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号livox 介绍更换环境更换livox激光雷达型号 livox 半固体激光雷达 gazebo 仿真 | 更换环境与雷达型号
livox 介绍
览沃科技有限公司(Livoxÿ…
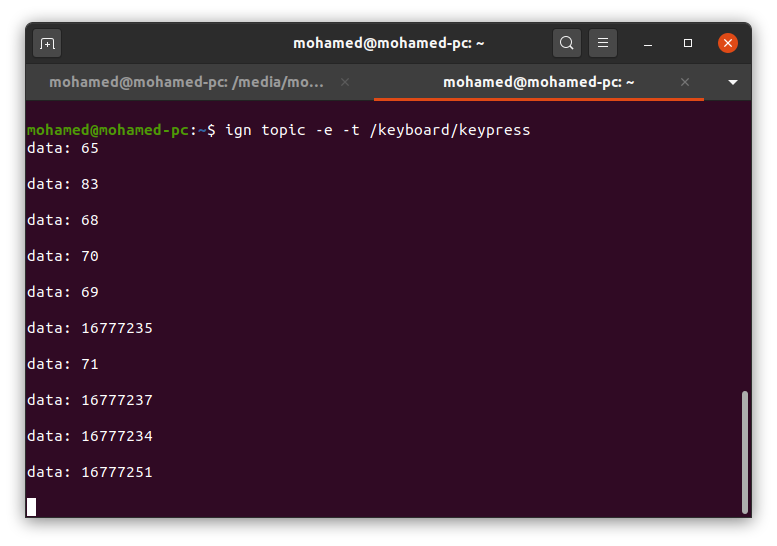
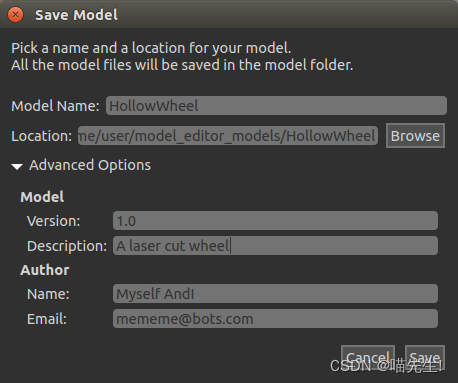
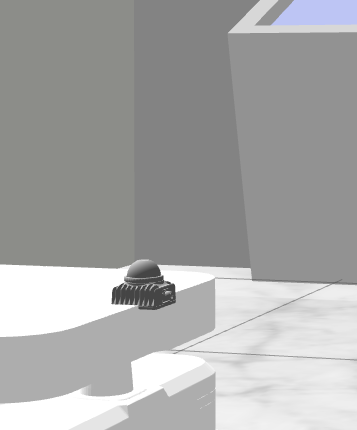
Gazebo GUI模型编辑器
模型编辑器
现在我们将构建我们的简单机器人。我们将制作一个轮式车辆,并添加一个传感器,使我们能够让机器人跟随一个斑点(人)。
模型编辑器允许我们直接在图形用户界面 (GUI) 中构建简单的模型。对于更复…
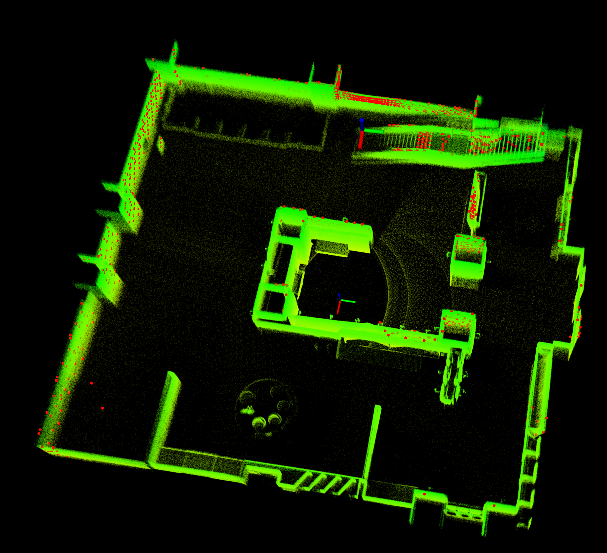
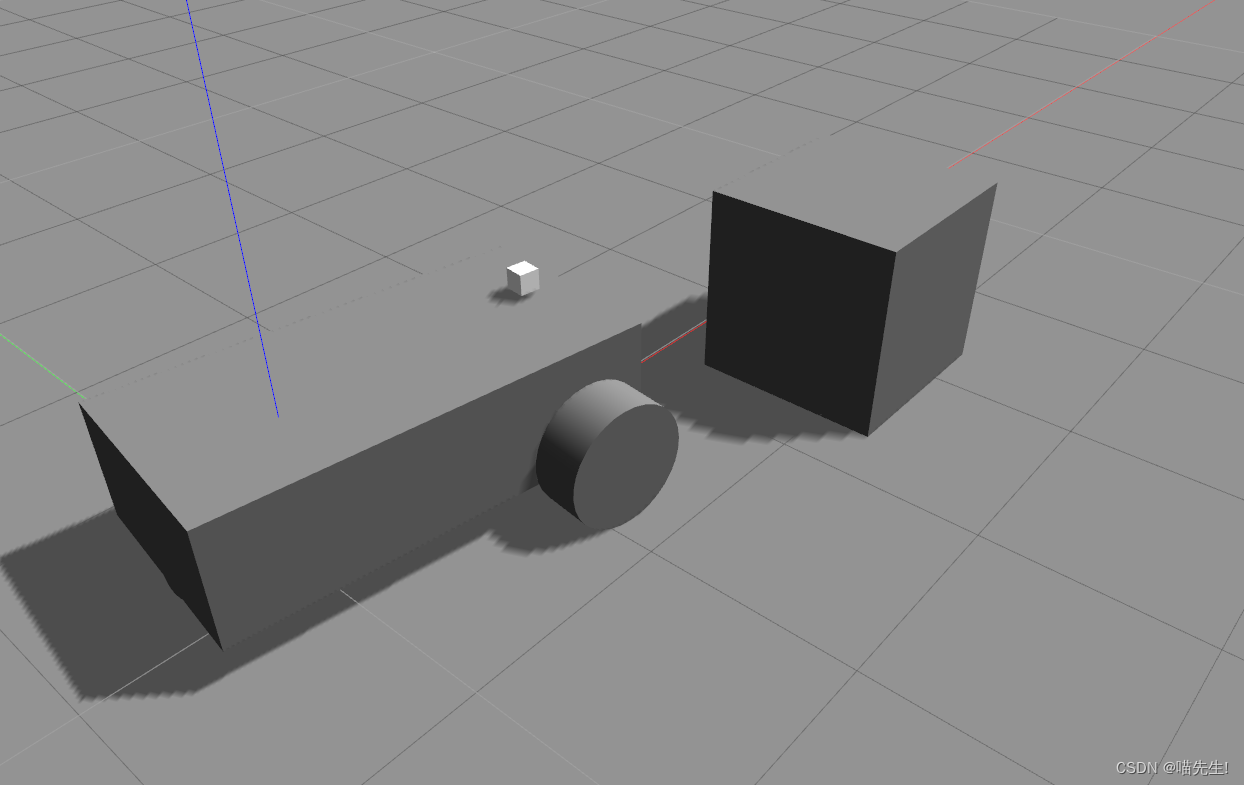
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 惯导仿真平台测试 FAST-LIO2 前言立方体平台加入 livox mid360 激光雷达加入IMU模块调整底盘大小 并设计调用接口测试 Fast-Lio2 前言
livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。
但是其只发布雷达的数…